s> [!NOTE] 注意
本笔记是针对 OpenPI 实验室的 PI 系列建模进行分析的一部分,主要负责对 PI05 的 lerobot 实现进行分析,更偏重代码层面。选用 lerobot 而非官方实现的原因是官方使用的是 JAX 框架而非 torch,有迁移困难。 本文档基于Lerobot 0.5.0 版本(2026.3)进行分析,请注意是否过时。 理论层面可以查看PI 系列 Policy、Diffusion & Flow model、CS336 Assignment 1
flowchart TD Root["PI05@lerobot解析"] Theory[模型理论] PI_Policy[PI系列policy] Diffusion["Diffusion & flow model"] CS336[CS336 Assignment 1] Engineering[代码工程实现] Abstract[lerobot抽象层设计] CodeAnalysis[PI05代码分析] abstract1[lerobot policy抽象层分析] abstract2[lerobot script抽象层分析] Root --> Theory Theory --> PI_Policy PI_Policy --> Diffusion PI_Policy --> CS336 Root --> Engineering Engineering --> Abstract Abstract --> abstract1 Abstract --> abstract2 Engineering --> CodeAnalysis
总览
PI05的建模采用了三层抽象层的设计,包括PI05Policy,PI05Pytorch,PaliGemmaWithExpertModel这三个逐级抽象的类设计。
PI05Policy ← LeRobot 接口层(处理 batch、评估、训练)
└── PI05Pytorch ← 扩散模型核心(flow matching 前向/采样逻辑)
└── PaliGemmaWithExpertModel ← 双流 Transformer 融合层
├── paligemma (VLM) ← 处理图像 + 语言 tokens(prefix)
└── gemma_expert ← 处理动作 tokens(suffix)
在内部的信息大部分是以字典的形式储存,即以键值对的形式储存包括视频 RGB 图像,关节状态等数据。
PaliGemmaWithExpertModel
数据类型
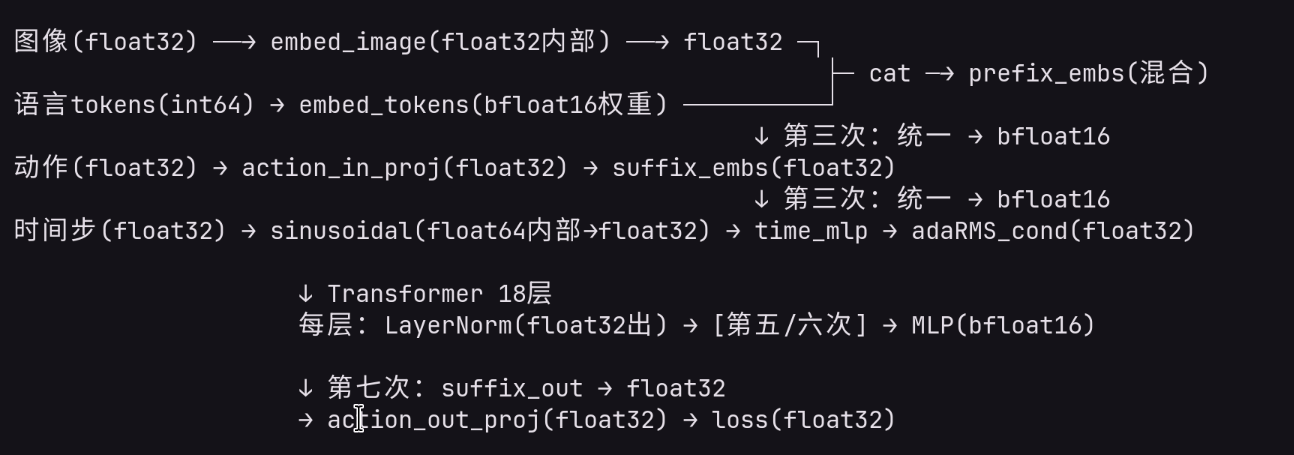
在to_bfloat16_for_selected_params(l.398)建立了一个混合精度格局:
整体 → bfloat16
然后以下路径保持 float32:
- vision_tower (SigLIP 视觉编码器)
- multi_modal_projector (视觉→语言维度投影)
- input_layernorm (所有层的输入 LayerNorm)
- post_attention_layernorm (所有层的 post-attention LayerNorm)
- model.norm (最终 norm)
这个设计的动机注释:toggle causes optimizer “same dtype” error,即混合精度训练时 LayerNorm 参数如果是 bfloat16,优化器在 dtype 转换时会报错。LayerNorm 保持 float32 也有数值稳定性考量。
| 参数类型 | dtype | 原因 |
|---|---|---|
| 视觉编码器 + 投影层 | float32 | 精度敏感,避免梯度消失 |
| LayerNorm (输入/输出/最终) | float32 | 优化器兼容 + 数值稳定 |
| attention QKV/O proj + MLP | bfloat16 | 节省显存 |
该类在定义to_bfloat16_for_selected_params()的同时,在模型初始化的时候就定义好所有参数的数据类型,只需定义一次。但是传入的数据类型需要进行转换: | ||
 | ||
| 其中真正为了和参数匹配的转换只有三处: |
- 第三次(进 transformer 前,embedding → bfloat16 匹配 attention 权重)
- 第五/六次(transformer 内部,匹配 o_proj 和 MLP 权重)
- 第七次(出 transformer 后,匹配 action_out_proj 和 loss 计算)
其余转换多是为了数值精读或防御性设计。
Mask设计
本模型带有三种 Mask 的定义:
pad_masks bool[B,N]:哪些位置是真实 tokenatt_masks float[B,N]:每个token的“组边界”标记att_2d_masks bool[B,N,N]:token i 能否看到 token j
Transformer和流匹配
PI05Pytorch
Prefix & Suffix
在PI 系列 Policy中可以看到 PI05 是分为 VLM 和 Action Expert 两部分,以一个类似 MoE的方式处理不同类型的数据来源,对于视觉数据和语言,输入 VLM,对于动作状态,输入流匹配网络,并且流匹配模型可以看到 VLM 中的状态,其中输入 VLM 网络的就算做 prefix,而输入动作专家网络的就算 Suffix。
embed_prefix(self, images, img_masks, tokens, masks)(L.641):
| 参数 | 形状 | 含义 |
|---|---|---|
images | List[[B, C, H, W]] | 每个摄像头一个 tensor,由 _preprocess_images 准备 |
img_masks | List[[B]] | 每个摄像头对应一个 bool 掩码,True 表示该样本这个摄像头有图像 |
tokens | [B, L] | 语言 token 的整数索引(由 tokenizer 生成) |
masks | [B, L] | 语言 token 的 padding mask,True 为真实 token |
def embed_prefix(
self, images, img_masks, tokens, masks
) -> tuple[torch.Tensor, torch.Tensor, torch.Tensor]:
"""Embed images with SigLIP and language tokens with embedding layer."""
embs = []
pad_masks = []
att_masks = []
# Process images
for img, img_mask in zip(images, img_masks, strict=True):
def image_embed_func(img):
return self.paligemma_with_expert.embed_image(img)
img_emb = self._apply_checkpoint(image_embed_func, img)
bsize, num_img_embs = img_emb.shape[:2]
embs.append(img_emb)
pad_masks.append(img_mask[:, None].expand(bsize, num_img_embs))
att_masks += [0] * num_img_embs
# Process language tokens
def lang_embed_func(tokens):
lang_emb = self.paligemma_with_expert.embed_language_tokens(tokens)
lang_emb_dim = lang_emb.shape[-1]
return lang_emb * math.sqrt(lang_emb_dim)
lang_emb = self._apply_checkpoint(lang_embed_func, tokens)
embs.append(lang_emb)
pad_masks.append(masks)
num_lang_embs = lang_emb.shape[1]
att_masks += [0] * num_lang_embs
embs = torch.cat(embs, dim=1)
pad_masks = torch.cat(pad_masks, dim=1)
att_masks = torch.tensor(att_masks, dtype=torch.bool, device=pad_masks.device)
bsize = pad_masks.shape[0]
att_masks = att_masks[None, :].expand(bsize, len(att_masks))
return embs, pad_masks, att_masks
prefix 是处理图像和语言的输入,需要将其 embed 到向量格式,包括embs,pad_masks,att_masks三个向量,即经过 embed 过的图片张量,padding mask 和 attentionmask:
embs储存真实的图片信息,图像以[B,C,H,W]输入,即batch_size,Channel,Height,Width的形式输入,再经过paligemma_with_expert.embed_image的方式进行embed;pad_mask是用于储存画面是否有效的信息,从传进来的img_mask中获得;att_mask是用于表示表示数据块间的注意力关系
注意不需要 casual mask(因果掩码),因为因果掩码本身是为了防止模型在训练中查看未来的 token 导致训练失效,但是因为 PI05 是使用流匹配的方式预测动作,输出的动作场 不会作为上下文输入模型,因此不需要因果掩码,可以参见Diffusion & Flow model文末的代码部分。
多路摄像头数据的存储形式也是个令人疑惑的部分:如果图像以[B,C,H,W]的形式输入,那多路摄像头的数据储存在哪?可以在L.1144 的_preprocess_images这个函数中可以看到这个函数负责从 lerobot 格式的键值对字典中取出多路摄像头加到一个列表:
images = []
img_masks = []
for key in present_img_keys:
img = batch[key]
...
# Normalize from [0,1] to [-1,1] as expected by siglip
img = img * 2.0 - 1.0
images.append(img)
mask = torch.ones(bsize, dtype=torch.bool, device=device)
img_masks.append(mask)之后就是传入PI05Pytorch的sample_action之后就是本函数了。